A soft touch
If robots are going to be able to lift soft things without damaging them, we need to think differently.
Industrial production is increasingly automated. Industrial robots are the workers that assemble products, while the raw materials with which they work are moved from one machine to another by other robots. Today’s highly automated assembly lines are places where machines do virtually all the work.
Not surprisingly, improving the efficiency of this kind of assembly line involves a focus on robots. But one of the most important aspects of improving efficiency is finding good ways for robots to get hold of what they need to handle and to mini-mize the time spent handling materials between workstations. In fact, this is a much bigger problem than what people think, says NTNU Professor Terje Lien.
“For many businesses, more than half of all time spent mak- ing a product goes to moving goods between workstations”, he says.
Stuck fast
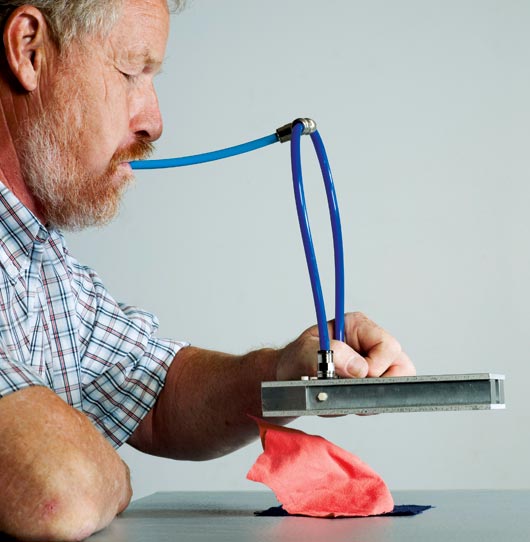
It looks as if Lien has sucked all the air out of a hose that snakes into a metal rectangular box. This square of metal has holes on one flat side, to which a piece of cloth is stuck. When the professor stops sucking, the cloth falls on the table.
But it was an illusion, because Lien wasn’t sucking air out of the box, he was blowing. The air he blew in passed through a special slit valve that he has patented. These gaps increase the speed of the air where it passes through a channel, so that a slight negative pressure occurs in a small hole at the end of a channel. The metal box contains a number of such ventilation channels, with a mini low-pressure area in each one of them. Professor Lien calls it the “Coanda ejector”.
These small low-pressure areas work as grippers for light, porous objects. A row of such holes exiting through a metal plate could lift a piece of cloth from one pile and add it into another, without causing it to curl or wrinkle in any way.
Moving things is hard to do
The amount of time wasted in moving things from one workstation to the next comes as a surprise to many. In practice, this means that real flesh-and-blood workers have to tackle this job: It is they who must pick up the piece of cloth in the clothing industry, or the fillet of meat or fish in the food industry, or the square of foam in the furni-ture factory, and move it to the next workstation. A robot simply cannot do this kind of job because it cannot easily pick up these kinds of materials.
Currently, only people have the fine motor skills to handle these kinds of raw materials properly. “Proper” means that the cloth is laid out nicely and not dumped in a wrinkled pile. If the raw material is a fish fillet, it needs to be free of external damage and should look appetizing. If it is a piece of furniture, it needs to be free from stains, tears or other external damage that would make the chair or sofa less fine.
One answer is the Coanda ejector, which has been patented. Another is the needle method. These are long, thin needles that are set at an angle, so that they meet each other. The needles are so thin that they do not damage the object. This method is particularly good for handling fish and meat. It has been patented by scientists at SINTEF Production Engineering.
“The Tongue Method”
A third approach is the “tongue method”: The effect mim-ics what happens when you lick a cold, damp surface (a door handle, a lamp post) and your tongue gets stuck tight.
The principle itself is known as the Peltier effect, and is more than one hundred years old. Sending a current through special semiconductors can cause one end to be hot and the other cold. Arranging many such semiconductors next to each other and attaching them to thin ceramic plates results in one plate being warm and the other cold.
The method, which was patented by a German several decades ago, is to put the cold side of the element against an object with a moist surface. It is then frozen solid to the element, so that it can be moved. If this kind of element is attached to a robot, the robot then has a “freezer gripper.”
The gripper can pick up moist objects, such as fresh fillets of fish or meat, and move them without harming them in any way.
Professor Lien’s idea is to reverse the dir-ection of the current during the procedure, so that the metal surface switches from cold and warm when you want the fillet to come off. “Here we have experimented a great deal to determine the optimal tempera-tures”, he says.
In the testing phase
The “Tongue Method” is now being tested by both the fillet industry and furniture industry. Work is still ongoing to find a company that might want to use the Coanda ejector and the needle method as grippers.
“But these kinds of companies can only be found outside of Norway,” Lien says.
“We don’t have Norwegian producers in these areas.”
Tore Oksholen