
Autonomous robots at sea
This boat has no captain. Nor is it remotely controlled. It nevertheless manoeuvres safely between other vessels.
In recent years, the Trondheimsfjord has been an arena for testing unmanned boats. Researchers at NTNU have developed new control systems for maritime robots, in an approach that is thought to be the first of its kind in the world.
First remote, now self control
Mention unmanned vehicles, and the first things that usually come to mind are military aircraft or underwater vehicles – or perhaps even the robot rover that slowly rolled around the Martian landscape, taking samples. Unmanned vehicles at sea are much less familiar to the general public.
However, unmanned boats, called USVs (Unmanned Surface Vehicles), have in fact been used in a military context since the Second World War. At first they were simple, remotely controlled boats that were either used for target practice by manned naval vessels or as tools for dangerous mine clearance operations.
The focus has since shifted more towards developing advanced unmanned technology for use either in the air or under water. As a result, the important link that connects these two distinct areas – the surface of the sea itself – has been overlooked.
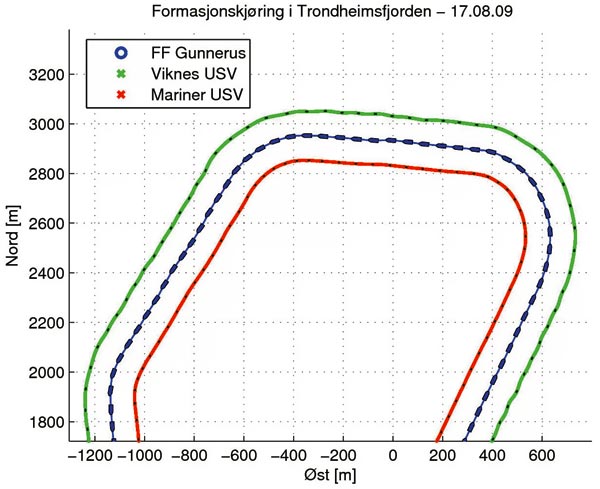
Formation sailing in the Trondheimsfjord:
NTNU’s research vessel Gunnerus is closely flanked by two USVs that precisely track the mother ship’s movements.
Ill: Morten Breivik
The Americans, world leaders in unmanned vehicle technologies, have only recently started to show an interest in more sophisticated USV technology. Still, the commercial USV solutions available today are mostly used for military purposes. For example, remotely controlled boats are commonly used for harbour surveillance in areas such as the Middle East and Singapore.
Currently, the research challenge is to move from remote control to self control, so that unmanned boats can operate partly or completely independently to solve various tasks. One task might be to autonomously transport goods from A to B without colliding with other vessels. Another might be to travel in formation with a mother ship, without prior knowledge of the mother ship’s movements.
Follow the mother ship
Morten Breivik’s expertise lies in this last task. As a researcher at the NTNU’s Centre for Ships and Ocean Structures (CeSOS), Breivik has developed a formation control system where a number of USVs can move up alongside a manned mother ship and precisely follow its movements.
“Other research groups around the world are working to get USVs to travel together relative to a predetermined geometric pattern,” says Breivik. “But with our system, the USVs don’t need to know about routes in advance. They can hook up with the mother ship when necessary and closely track its movements. The captain of the parent vessel can then control his vessel as he wants, without being restricted to a predefined route in order to keep formation.”
“As far as I know, NTNU is first in the world with a technology that allows USVs to track the movements of other vessels at high speed,” Breivik says.
Hunting a point
Breivik has taken mathematical formulas, called algorithms, from the guided missile community and adapted them for marine motion control purposes.
“Much like a missile can chase an enemy aircraft in the air, an unmanned boat can chase a virtual point moving on the sea surface. This point can be located at a specific position in relation to the mother ship and made to move along with it,” he explains.
“And for this to be possible, all the follower vessels tracking the mother ship have to know its position, course and speed. This information can be sent by the parent vessel via radio signals,” he says.
Breivik says that there’s also a boat identification system called AIS (Automatic Identification System) that requires all vessels over a certain size to send out information about their movement to other ships in the immediate vicinity. This information can also be used by USVs. In addition, USVs can be equipped with sensors that enable them to independently derive the mother ship’s movements if all other alternatives should fail.
“Soon, only the imagination will limit what can be done in practice.”
Researcher Morten Breivik
Speedy surveys
“Currently, all survey operations at sea are conducted by manned vessels that have limited capacity,” Breivik says. “With USV-based formation control, the time needed to map seabed areas or explore oil and gas resources can be dramatically reduced. The survey vessels will be able to command a desired number of USVs in a desired formation pattern to scan much wider areas at a time.”
In this context, the USVs function as measuring points for data collection that can be sent wherever they are needed.
There are several other applications for these vehicles, but we’ll return to those later.
Collision-proof
CeSOS also has another ace up its sleeve: an advanced collision avoidance system. This system has been developed as part of cybernetics student Øivind Loe’s master’s thesis.
If an unmanned boat is to manoeuvre safely on its own, it must not only be able to steer away from other boats, but also from smaller objects on the water surface, such as kayaks and logs. It must be able to handle any situation, such as manoeuvring into narrow and congested ports. And it must know where the land and reefs are located.

Norway has always been a maritime nation to be reckoned with. Some key control technology highlights at sea:
In the 1960s and 1970s, Norway developed revolutionary automation technology for the shipping industry, which improved the competitiveness of the Norwegian merchant fleet. The control system groups at NTH and SINTEF were heavily involved in this development.
In the 1970s and 1980s, Norway developed a groundbreaking positioning technology for the offshore industry (Kongsberg Våpenfabrikk with its Albatross dynamic positioning system). NTH’s Department of Engineering Cybernetics, headed by Professor Jens Glad Balchen, played a central role in this work.
New challenges and a new technological adventure currently await in the harsh and inhospitable northern waters. Will Norway again make its mark in the world?
Loe has created a system that combines two algorithms, each good at long-term and short-term planning, respectively. An unmanned boat can thus plan a collision-free route from A to B based on electronic map data. But it can also update its route along the way if the map turns out to be incorrect or if other vessels change speed or course.
“Computers are much better and more accurate than humans in figuring out how to handle potential collision situations, with many ships moving around the vessel in different directions at various speeds.”
“The main challenge in making practical use of such a system lies in the sensor technology. A composite sensor package that can be trusted to detect both large and small objects in all types of visibility and weather conditions must first be developed. This kind of system can possibly result in far less collisions than is the case with today’s manned ship traffic,” he says.
Full scale, real time
NTNU researchers haven’t developed the control systems for a new generation of unmanned boats alone. Their main development partner has been Maritime Robotics (MR), a small Trondheim-based company. MR owns two leisure boats, a Polarcirkel 660 and a Viknes 830, both of which have been retrofitted with technology suited for unmanned operations. The company arranges for all of the basic functions required by CeSOS, including propulsion, computers, communications solutions, sensors and power supply.
Despite NTNU’s advanced ship model basins, access to unmanned research vehicles and Trondheimsfjord as a research laboratory represent an ideal situation for the academic-industrial team, because they can conduct full-scale tests at sea. Researchers have thus tested both collision avoidance and formation control in the fjord. They have also hired NTNU’s research vessel Gunnerus to participate in some of the experiments.
“We then got to test the formation control system using a real manned mother ship.
The captain of the Gunnerus manoeuvred along his self-chosen route while the unmanned boats accurately tracked their assigned positions using continuously transmitted real-time information,” says Breivik, who enthusiastically shows an electronic log from one of the trials.
Saving energy
His group will also gradually add more features such as dynamic positioning (DP) for small boats.
DP is currently employed by relatively large vessels operating in the offshore industry, such as supply ships bringing goods to oil platforms. Such technology is required to make a boat stay still solely through the use of its own propulsion system. GPS allows the vessels to maintain an accurate position even in quite bad weather.
The goal of the researchers is to develop what they call a weather-optimal DP solution for small unmanned boats, which will allow the vehicles to burn a minimum of fuel while keeping still when conducting their surveillance or search missions. Hence, while the USVs continuously shift their bows up against the weather to minimize energy use, their cameras rotate the opposite way to stay focused on their goals.
“Another important application,” explains Breivik, “is resupplying unmanned underwater vehicles (UUVs) at sea. Such vehicles are increasingly being used to collect different types of ocean data. They have limited battery capacity and must often be accompanied by large and expensive support vessels. If the manned support vessels can be replaced with USVs, it is possible to save time, money and also the environment.”
Many functions
The advantages of this technology are that it can reduce manpower costs, increase operational efficiency and save lives. In addition, humans can never manoeuvre as precisely as GPS-controlled boats can.
Maritime robots can be used in many fields, such as disaster areas, in extreme environments, or in heavily polluted areas. They can be used to monitor territorial waters, as tools for the Norwegian Coastal Administration in the fight against illegal fishing, or to help harbour police detect speeders. They can be used to patrol and protect offshore installations as well as ships in pirate-infested waters, and can also have a role in the exploration and production of oil and gas. In addition, they can be used for military purposes, and for transportation and recreation.
Morten Breivik does not rule out the possibility that in the next 10 to 20 years, unmanned cargo ships will be shuttling between the great ports of the world. Or that for those who can afford it, recreational boats will be programmed for the Greek islands, secure in the knowledge that the journey will take place safely and collision-free without the need to lift a finger other than to pick up a coffee cup ….
Adding intelligence
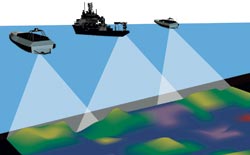
Unmanned vessels moving in formation can be used to dramatically reduce the time it takes to map seabed areas or conduct surveys for oil and gas resources. Manned survey vessels can attach unmanned boats in order to scan larger areas at a time.
Ill: Maritime Robotics
“In the long term we want to develop more advanced cognitive functions, à la artificial intelligence, for the maritime robots. These functions will enable the boats to make independent decisions in unfamiliar and chaotic environments. However, this will require the boats to be equipped with intelligence similar to humans.”
“Today’s unmanned boats can carry out missions that we carefully specify in advance. That is, they do what most computers can do better than people – provide very high precision in technical operations. But we cannot yet give a USV approximate orders that the robot itself must boil down to something very concrete and practical. Such cognitive functions represent the next big step in the technological evolution for unmanned vehicles,” says Breivik.
However, he emphasizes that this step probably lies decades into the future.
“It’s also a question of whether we humans are so intelligent that we are able to understand our own intelligence and thus reproduce it artificially. If not, we will probably never witness truly autonomous boats, only weak copies of our own capabilities.”
“But in the mean time, it is enough that unmanned boats relieve us of the need to undertake dull and dangerous missions that we prefer to avoid.”
From boats to aircraft
The marine control researchers have recently taken a perhaps unexpected step: They have started looking at unmanned aerial vehicles (UAVs) for use in maritime surveillance operations, especially for northern areas and our vast territorial waters.
“It’s possible to imagine unmanned aircraft working as part of a large network of unmanned vehicles, including unmanned surface and underwater vehicles,” says Breivik. “Such a network can enable monitoring of fish stocks, pollution, ship traffic and oil activity over large areas – in real time – which will enable the government to react quickly with informed decisions to safeguard both the environment and the economy.”
The first step is to develop imaging algorithms that can automatically detect and classify vessels on the basis of video from UAV-mounted cameras. The project is being funded by the Research Council of Norway and led by the small Kongsberg-based company Simicon. The project’s partners include the Norwegian Coastal Administration, the Norwegian Meteorological Institute, Det Norske Veritas, and Maritime Robotics.
Almost limitless
“When it comes to unmanned technology, the possibilities are enormous,” Breivik says. “Soon, only the imagination will limit what can be done in practice. The simultaneous developments in boat design, materials science, computer technology, communications, navigation and sensor systems, propulsion technology and power supplies will enable systems that few people could imagine only a few years ago.”
“We are now at the beginning of a technological development that will turn most things upside down. In the United States, the Air Force is already training more UAV operators than pilots for manned aircraft. Norway now has a golden opportunity to pursue the development of unmanned technology for civilian and maritime applications,” Breivik says enthusiastically.
Nina Tveter



