Underwater robots that are always on call
More than 70 per cent of the Earth is covered by oceans. An increasing amount of critical infrastructure is being installed on the seabed. Sabotage and accidents increase the need for inspection and monitoring. These measures are currently very expensive, but the hope is that they can soon be carried out by robots that are permanently stationed on the seabed.
- January 2022: One of two communication cables to Svalbard is cut.
- 2023 and 2024: Cables, fibre-optic lines and gas pipelines in the Baltic Sea are blown up or cut. These incidents were classified as hybrid warfare.
Growing economic activity in the ocean is increasing the need for more regular monitoring and inspection of underwater infrastructure and its surroundings.
Autonomous underwater vehicles capable of monitoring and inspecting pipelines, cables and underwater installations are becoming increasingly important in an uncertain global security situation. We also need to know more about the seabed and the ocean space.
Currently, monitoring and inspections are carried out by large ships using sonar for broad surface-based scans, or using underwater vehicles that are accompanied by vessels and operated from control rooms on the mother ship or onshore. Both systems require large, expensive surface-based vessels and many people. Chartering a ship with a crew is very costly, and the CO2 emissions are significant.
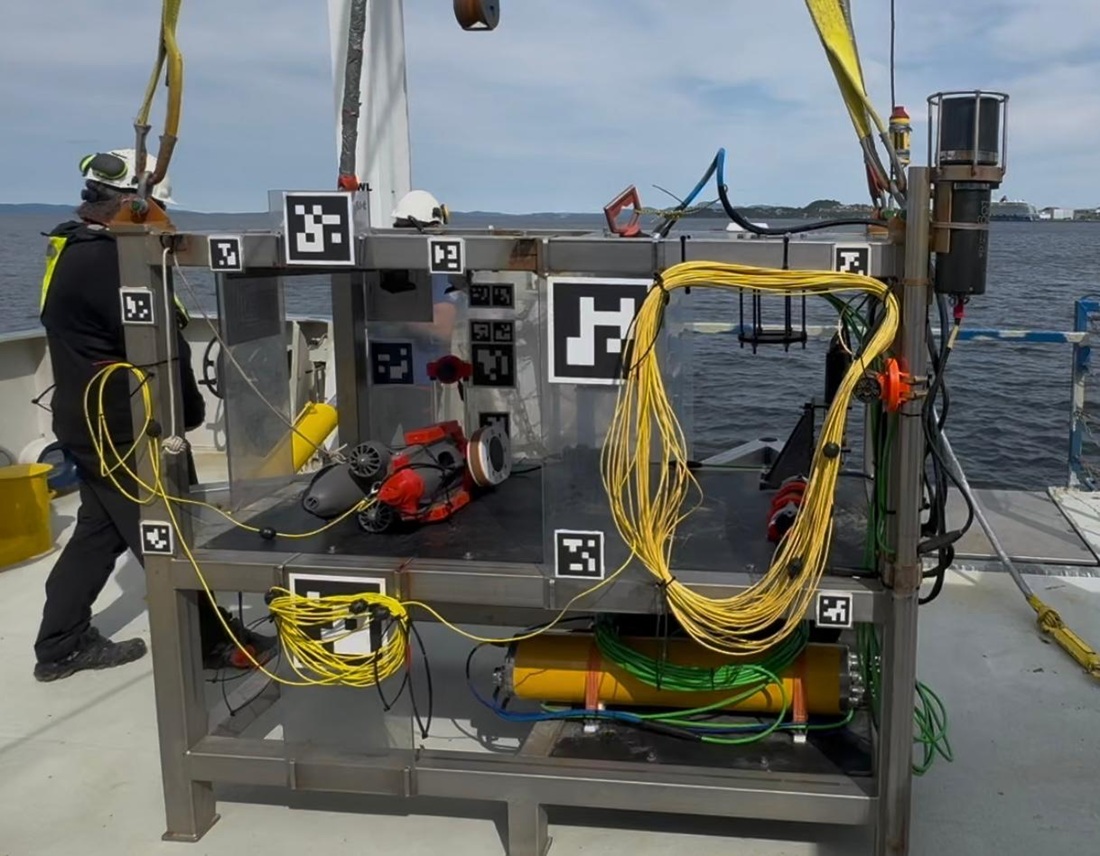
The docking station on the deck of the RV Gunnerus before it was lowered to a depth of 90 metres. Photo: Leonard Günzel, NTNU
‘Hearth and home’ at a depth of 90 metres
One alternative currently under development is autonomous underwater robots that can operate on the seabed for many months or years at a time, without being brought to the surface or ashore.
Professor Martin Ludvigsen at NTNU’s Department of Marine Technology says that underwater robots capable of operating from fixed bases on the seabed, independent of costly surface vessels, will play a key role in monitoring, inspecting and protecting the increasing amount of infrastructure on the seabed – all over the world.

The Blueye robot created this 3D image of the docking station at a depth of 90 metres. Illustration: NTNU
Researchers from NTNU have now successfully conducted trials involving an autonomous underwater vehicle (AUV) and a docking station at a depth of 90 metres.
Without human intervention, the robot conducted inspections of infrastructure and found its way back to the docking station where it connected to recharge its batteries and upload the collected data.
“These tests represent important steps toward fully autonomous operations over extended periods of time,” said Leonard Florian Tom Günzel, a PhD research fellow at NTNU’s Department of Marine Technology.
He explains that the motivation behind developing resident underwater vehicles is to reduce costs and thereby make the technology accessible to a wider range of users. Another important reason is seafarer safety and protection of the environment.
Simpler and more affordable
For years, there has been talk of deploying AUVs to ensure a more or less constant presence around oil and gas installations. There are already a few large, advanced systems in place. The recent spate of sabotage incidents targeting infrastructure, communication fibres, power lines and pipelines will increase the demand for more and simpler solutions.
More research and development are still needed to reach the goal of robust and reasonably priced solutions.
“The groundwork has been laid, and the first steps have been taken toward the development and deployment of full-scale autonomous underwater robots equipped with a docking station for charging and data transmission,” said Ludvigsen.
The most important tasks relate to developing docking systems that are robust and durable. Autonomy, navigation, docking, communication and maintaining position, heading and course underwater are also all remaining challenges that need to be addressed.

The autonomy project was carried out by – from left to right: Ambjørn Grimsrud Waldum, Leonard Günzel, Gabrielė Kasparavičiūtė, Ai-Nhi Hoang, Jenny Krokstad, Md Shamin Yeasher Yousha, Dana Yerbolat and Abubakar Aliyu Badawi. Not present when the photo was taken: Martin Ludvigsen, Celil Yilmaz, Mahmoud Hussein Abdelrazik. Photo: NTNU
Blueye robot
The NTNU tests were conducted using a Blueye X3 underwater robot weighing approximately 10 kg that was specially equipped for the specific tests. Among other things, the robot was kitted out with a camera, sonar, sensors, communication equipment, an induction charger and a magnetic ‘mooring’ system.
Ludvigsen and Günzel highlight that this test robot provides NTNU with a platform that can be used by students, PhD research fellows and companies alike.
“We have developed a tool for the further development, testing and refinement of technology that can eventually be commercialized,” said Günzel.
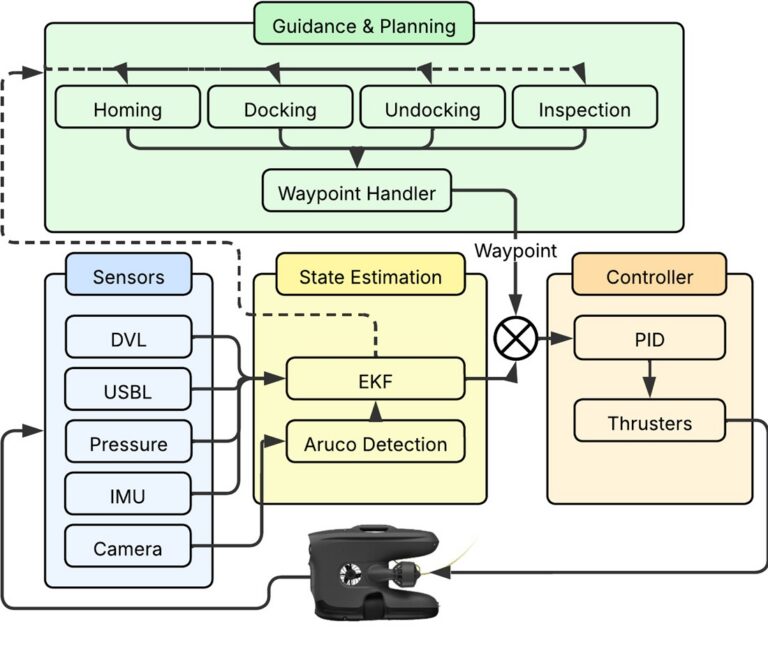
Schematic representation of the software and control system for the underwater robot. Illustration: Leonard Günzel, NTNU
Tested in Trondheim Fjord
The tests were conducted using NTNU’s existing infrastructure in Trondheim Fjord. A specially designed docking station was installed at a depth of 90 metres.
To enable the robot to locate the docking station and position itself correctly, a combination of low-data-rate acoustic communication and navigation technologies was used, including Ultra Short Baseline (USBL) positioning and visual markers that were read and interpreted using cameras and machine vision to guide the AUV into the station. Over short distances, it can also be controlled remotely and exchange data via an optical modem. The docking station is connected to land-based facilities via a cable for power and communication.
As soon as the AUV is docked, data can be transferred via high-frequency broadband communication, and the vehicle can be charged inductively. This type of equipment has already been developed in Norway.
So far, the AUV has been deployed on two occasions, with a total of four weeks of operational service. The system completed its inspection missions and achieved an autonomous docking success rate of 90 per cent. However, it has to reach a 100 per cent success rate, so new deployments are planned later this year.
“Docking is absolutely critical. Without an operator, the consequences of errors are much greater. If the AUV is unable to find its way back to the docking station, it cannot be recovered,” Ludvigsen said.
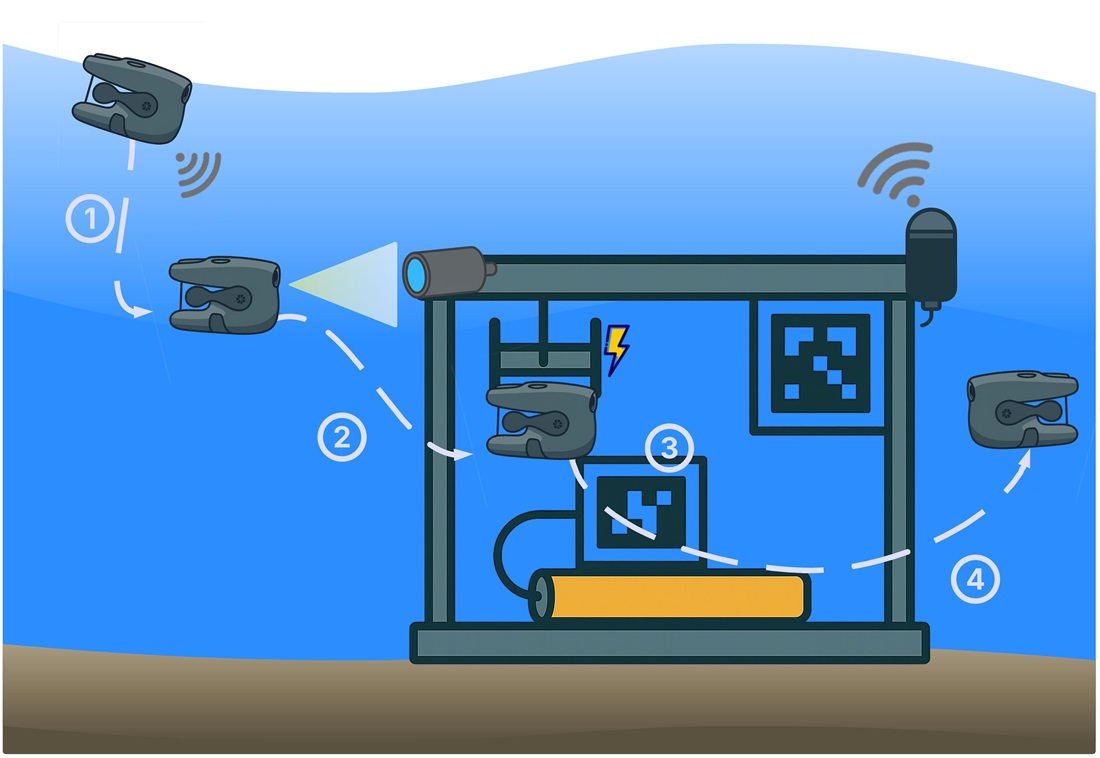
The underwater robot uses a combination of acoustic (1) and visual navigation (2) before docking to charge and upload the collected data. Illustration: NTNU
Tethered testing
Navigating on land or on the surface of the sea is relatively easy: GPS and other satellite systems provide access to location data. However, that is not possible underwater. The system thus uses combinations of several techniques to calculate position and course, including gyroscopes and accelerometers (INS – Inertial Navigation System) as well as an acoustic-based system (DVL – Doppler Velocity Log). The navigation systems require a lot of processing power, meaning they consume a significant amount of electricity.

Leonard Florian Tom Günzel, doctoral research fellow at NTNU’s Department of Marine Technology, believes that smaller and simpler resident underwater robots are close to commercialization. The technology is becoming accessible to more user groups. Photo: Berre
The researchers conducted the Blueye X3 tests using a tether to secure it. Future research trials will also be carried out using recovery tethers until a robust autonomous solution is in place. The process may still take some time, even though artificial intelligence (AI) helps the researchers find effective solutions more quickly.
One of the biggest remaining challenges is making the robot fully autonomous, meaning it is able to ‘understand’ and ‘think’ in such a way that it can make its own decisions based on observations of its surroundings. The trials revealed that fish swimming past the camera caused problems for the software that interprets the images.
“We’re working on that issue,” said Günzel.
Still some way to go
Ludvigsen believes there is still some way to go before a commercial solution is in place, but he is optimistic.
Professor Martin Ludvigsen believes that the NTNU project demonstrates that resident underwater vehicles can be used for a variety of tasks. They will make inspecting and monitoring seabed infrastructure both cheaper and easier to do. Photo: NTNU
“The tests showed that this solution works and that the operations are reproduceable. Resident underwater vehicles are a scalable and cost-effective solution for underwater monitoring,” Ludvigsen said.
The project has received funding from the Research Council of Norway and is being carried out as part of the Safeguard research project and the NTNU Centre for Autonomous Robotics Operations Subsea (Vista CAROS), supported by the Norwegian Academy of Science and Letters and Equinor.
Reference: Leonard Günzel, Gabrielė Kasparavičiūtė, Ambjørn Grimsrud Waldum, Bjørn-Magnus Moslått, Abubakar Aliyu Badawi, Celil Yılmaz, Md Shamin Yeasher Yousha, Robert Staven, Martin Ludvigsen. Docking and Persistent Operations for a Resident Underwater Vehicle. ArXiv. Robotics. arXiv:2602.16360. https://doi.org/10.48550/arXiv.2602.16360