The robot that climbs pipe walls
A robot that can move forward and inspect complicated pipe systems is currently under development. The robot can twist its way vertically up pipe walls.
Industrial pipe systems are inaccessible and narrow. They can be vertical and have junctions. Just as challenging, leakage points in water pipes must be located, the condition of oil and gas pipelines must be checked and ventilation systems need to be cleaned.
Most robots today are not very clever. They cannot climb or navigate in vertical pipes – and very few have active joints.
Cybernetics and optical measurement scientists at SINTEF are working on a solution.
Navigation by light and image
With the experience and knowledge gained from the snake robots Anna Konda and AiKo as a starting point, a team is now developing an intelligent pipe inspection robot on wheels that will be able to climb, navigate intersections and at any given time know its location in a pipe system.
The inspection robot will be able to move in pipes of various diameters, right down to 20 cm. Cybernetics scientists are developing the propulsion system while a team of optics scientists is working on the new robot’s visual system.
“We are currently developing the vision system than will enable the robot to navigate,” says Jens Thielemann at SINTEF ICT. “In the meantime, we are using the lego robot Mindstormer to collect the data to train the vision system.
This lego robot has a camera attached and moves around the pipe following a pre-programmed map. The next step will be to utilize the vision system as input to control the actual snake robot we are going to develop.”
The camera that will provide the new robot’s vision is an off-the-shelf, time-of-flight camera that provides a bathymetric chart of the pipe system using inflected light.
ASSISTANT: Jens Thielemann is using a lego robot in a pipe system as a first step in developing a new inspection robot. Photo: Kristin Svorte
“Combined with our algorithms, the robot will be able to navigate and move forward on its own,” says Thielemann. “The robot knows when a left or right turn is approaching and also contains a built-in path description detailing what tasks it should carry out in different situations.”
Functions as a train
“Given our previous work on snake robots, we have become experienced at controlling mechanisms that are linked,” says SINTEF cybernetics scientist Erik Kyrkjebø. “We now want to develop a robot with 10-11 joint modules, each with an identical pair of wheels cast in plastic.
The weight must be carefully distributed between the joints, so we have to find out how to put the camera and accelerator motor in two different joint modules. The robot will function as a train when operating horizontally. Such robots already exist, but we want to develop a robot that can climb, too.”
The scientists have designed several versions of the pipe inspection robot and have tested different solutions in order to make the new robot mobile and compact. They have now come up with a design they have faith in.
Twisting upwards
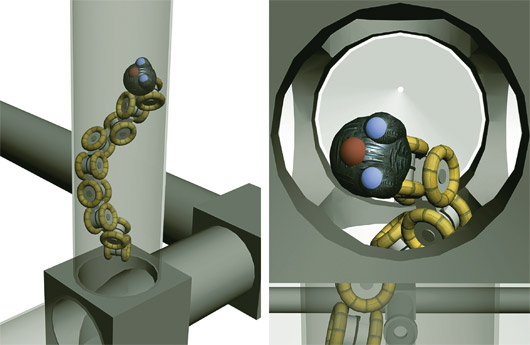
When the robot enters a vertical pipe, it lifts its head in the pipe and meets the pipe wall. It can then either move sideways with its abdomen against the pipe and twist itself upwards or it can topple backwards, attach itself to the pipe wall, in the same way as we would put our feet against a shaft wall to hold on, and then roll upwards.
The scientists emphasize that the project is at the design stage. In the summer, two of the 11 joint modules were tested to verify the concept and they plan to demonstrate a prototype model by the end of the year. This is just phase one, but the enthusiastic scientists are confident of success in the foreseeable future. The final version of the robot will be constructed in aluminium and is planned to be 1.5 m long.
By Åse Dragland




