Training underwater robots to find charging stations — on the seabed
NTNU’s largest laboratory – the Trondheim fjord – is something of an Eldorado for researchers developing underwater robots. A charging station has been installed on the seabed, and to ensure the robots can find the shortest route to the charging station, they train in the fjord.
Seven years ago, Trondheim fjord was declared the world’s first test site for autonomous vehicles. NTNU is highly active in the development of robotics that operate under water, on the surface of the water and in the air.
The researchers make frequent use of the large ocean laboratory.
The Centre of Excellence NTNU Amos, which is a leader in the development and research of marine robots and unmanned vehicles, reached its tenth year of activity this summer.
We joined the research vessel Gunnerus out on to the fjord to see how some of the underwater robotics work.
Out on the rolling sea
Gunnerus fills up with eager students, doctoral research fellows, researchers and partners from trade and industry. A robot measuring approximately 1 cubic metre and resembling an open crate filled with technology is loaded on board.

The research vessel Gunnerus is regularly used by Professor Martin Ludvigsen and the Amos community to test and train new innovations. Photo: Live Oftedal, NTNU
As we leave the quayside, the sun struggles to break through the rain showers that thrash across the deck.
For now, we are able to seek shelter in the galley as the vessel chugs towards its destination: a charging station located on the seabed.
In 2022, the charging station was established not far from Munkholmen at a depth of 350 metres. This station is a joint venture between NTNU and Equinor. It has recently been moved a little closer to Trondheim Biological Station and is located close to another subsea installation belonging to Equinor.
The robots can connect themselves to these stations when they need to top up their batteries. This means it is important that the robots can find their way to the charging station – and as efficiently as possible.
Eelume the pioneer
The first underwater drone developed at NTNU is a snakelike robot called Eelume. It is based on technology developed by both NTNU and SINTEF. Eelume is strongly inspired by how snakes and sea eels move through water.
Professor Kristin Y. Pettersen is the brain behind the fully developed version of Eelume, which is now in production. Enormous amounts of mathematical calculations form the basis for adaptations and efficiency improvements.
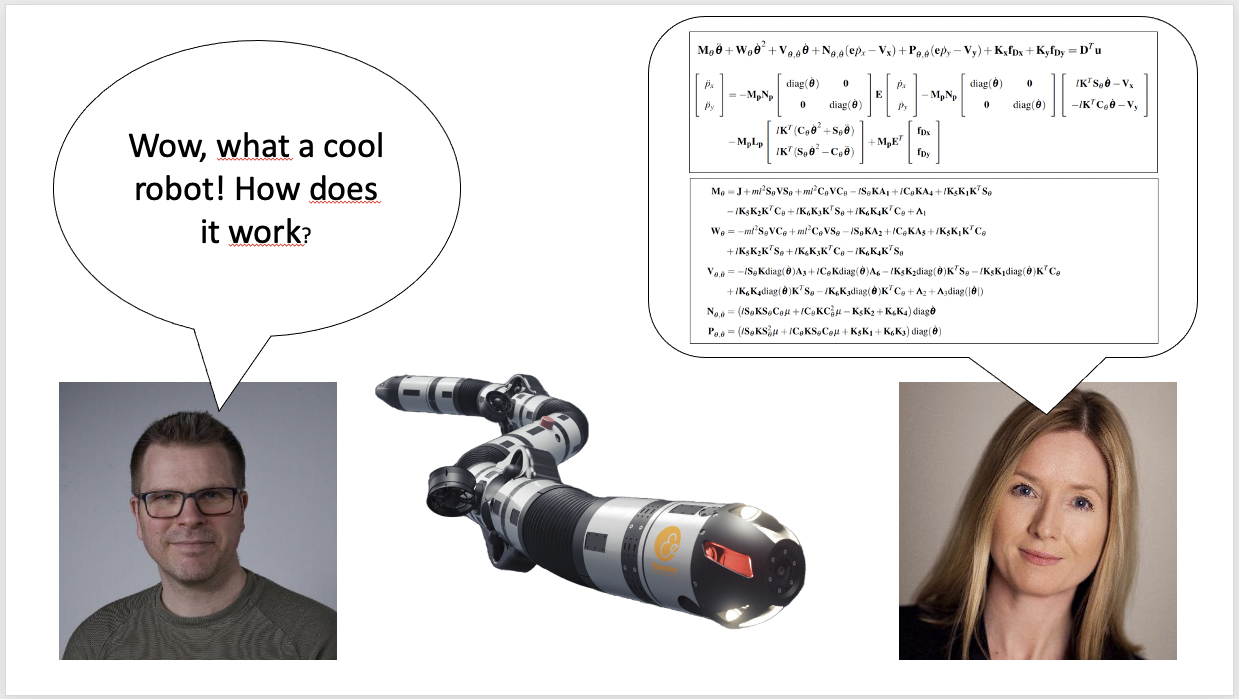
Marine archaeologist Øyvind Ødegård (left) made this illustration with Professor Kristin P. Ytterstad, the mind behind the snakelike robot, to show how many mathematical calculations are in a robot.
These snakelike robots are now being approved for use on the Åsgård oilfield in the Norwegian Sea. They will operate there as caretakers on the seabed checking that the underwater installations are in order. When they are out checking and possibly repairing something, the robots use electricity, meaning they need to recharge between jobs.
Oil leaks
The robot accompanying us out on the Trondheim fjord is the square crate filled with technology that we loaded on board before departure. Once Gunnerus has reached the correct position, the robot is slowly lowered into the sea.

The robot is lowered into the fjord. Photo: Ole Martin Wold.
The goal is for it to find the charging station as efficiently as possible.
A container standing on the deck is filled with powerful computers with large screens. Researchers, students and doctoral research fellows all pay close attention to the screens and monitor how the robot moves under water when searching on its own for the charging station.
One of them is doctoral research fellow Gabrielė Kasparavičiūtė from the Department of Marine Technology.
“A hypothetical scenario might be that there has been a leak at an installation, such as an oil platform. We would send down an autonomous underwater robot to examine the damage. The robot then has to check whether it has enough energy to reach the accident site, and it has to find the right algorithm to solve the task,” says Gabrielė Kasparavičiūtė.
This team of researchers, led by Kristin Y. Pettersen, is working to solve a variety of problems facing the underwater robots. The team also includes several other doctoral research fellows from VISTA CAROS and ERC Creme.
The robot’s journey towards the charging station takes time. Kasparavičiūtė has fed it algorithms that should give it a few extra challenges. The robot has to figure these out and ends up getting a hard, but useful workout.
Independent and ‘intelligent’ robots
“What we are testing and demonstrating here is a planning algorithm that enables the robot to choose a route to an inspection point. The choice of route is based on how much activity or work it must perform, and this is then linked to how much energy the robot has at its disposal,” explains Martin Ludvigsen.

Through the computers set up inside the container on the deck, the researchers monitor the robot’s journey underwater. Photo: Ole Martin Wold.
He is a professor at the Department of Marine Technology and one of the leading researchers in the field of underwater robotics.
A lot of work is being done in this research community to make the robots as autonomous as possible and able to make independent and smart choices.
It involves a robot choosing which tasks it has the capacity to complete based on how much power it has left, finding the shortest route to the places it will conduct inspections, and calculating how much power it requires to return to the charging station.
Versatile robots
The underwater robots have many applications, such as inspection of maritime installations like oil platforms, fish farms, quays, boat hulls, etc.
Underwater robots are also used to map the geology of the seabed and marine life, such as coral reefs. Mapping marine life provides important information about environmental changes.
Read more: It will soon be cheaper and easier to explore the seabed
The underwater robots are also used to transport measuring equipment and sensors used to collect data from the ocean.
Read more: Revealing the mysteries of the polar night
They are being used to investigate archaeological finds on the seabed. Among other things, a major survey is taking place of what is at the bottom of Mjøsa, Norway’s largest lake.
Read more: Shipwreck found at the bottom of Lake Mjøsa
And to document the ship graveyard around Svalbard.
Read more: How new technology finds shipwrecks on the seabed

These researchers use powerful computers to follow the robots’ progress in the ocean depths. From left :Markus Fossdal, Gabrielė Kasparavičiūtė, Ambjørn Waldum, Kay Arne Skarpnes and Erlend Basso. This team works with other PhD candidates in VISTA CAROS and ERC Creme, led by Kristin Y. Pettersen. Photo: Idun Haugan, NTNU
Captions
Marine archaeologist Øyvind Ødegård (left) made this illustration with Professor Kristin P. Ytterstad, the brain behind the snakelike robot, to show how many mathematical calculations are in a robot.
The research vessel Gunnerus is regularly used by Professor Martin Ludvigsen and the Amos community to test and train new innovations. Photo: Live Oftedal, NTNU




