
Creating systems that understand the Arctic
How can ships travelling in the Arctic maintain their position when ice pushes them in different directions?
Travelling in ice-choked waters can be a daunting affair. Ocean ice is treacherous and constantly moving. Icebergs can drift in and do great damage, and powerful polar winds can pick up suddenly and unexpectedly.
And yet shipping, research and tourism are bringing increased vessel traffic to the Arctic. Oil and gas companies are also sniffing around in northern reaches.
Øivind Kåre Kjerstad is a postdoctoral fellow at the University Centre in Svalbard (UNIS) and NTNU, and is researching the operations and control of ships in ice and extreme weather. His results may enable more ships to complete complicated missions under extreme conditions in Arctic waters.
- You might also like: The jewel in the crown
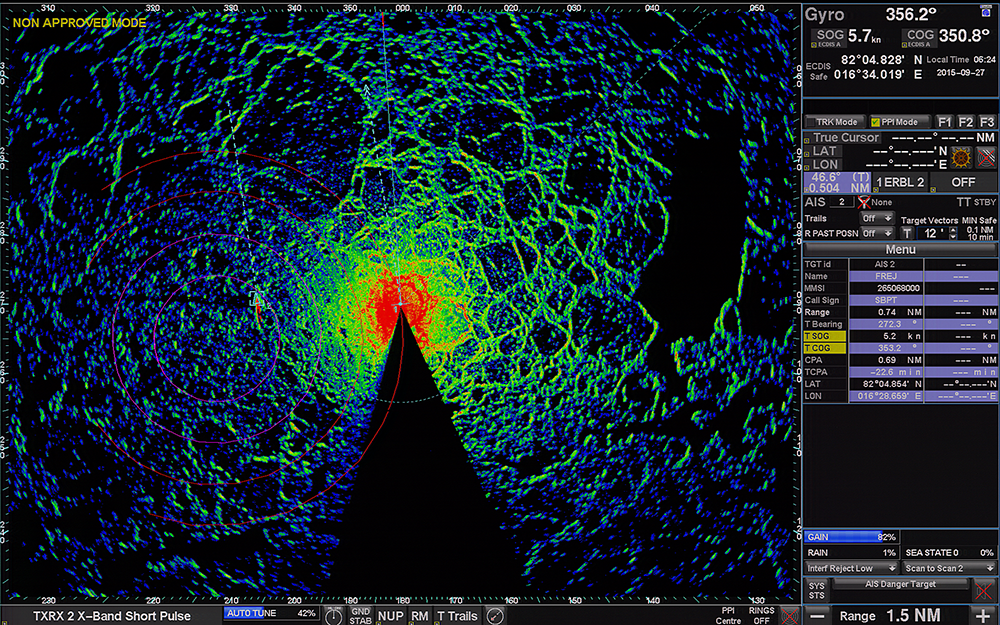
Here’s what the radar operator’s screen looks like aboard the icebreaker Oden as the radar shows the ice around the ship. Photo: SAMCoT
Maintaining position without an anchor
“I work with dynamic positioning in ice and extreme weather,” says Kjerstad. “The technology is mainly used to maintain a boat’s position over a point on the seabed. For operations in the Arctic, often an entire fleet of ships is cooperating on complicated operations. They have to stay in a group, and it’s important for all the ships to work together and to have the necessary information about the ice conditions.”
Imagine a ship or other floating structure remaining stationary without using anchors. This is not necessarily easy in areas where ice can drift quickly and powerfully and push the vessel in other directions. The force of the ice can vary greatly, from nothing one minute to violent the next. And the weather can change just as quickly.
Dynamic Positioning (DP) is designed to keep a vessel in place by using the ship’s own propellers, rudders and thrusters. A control system does this automatically several times a second, calculating the forces required to compensate for the surroundings and adjusting the vessel back to the desired position.
- You might also like: Lazarus ice
Increasing the operational window
Kjerstad and his colleagues make mathematical calculations based on information that includes ice thickness, concentration of ice, waves, wind, acceleration and position. The researchers analyse the calculations theoretically, before designing algorithms to compensate for environmental forces and coding them into the DP system.
First, the algorithms are tested on a simulator, then on ship models in laboratory experiments, and finally aboard real vessels. The scientists’ results may increase the operating window for vessels in the Arctic, so they can avoid being forced to abort their mission.
“This technology is important for safety, the economy and the environment. By using the vessel in a better way, it creates less wear and tear on it and achieves the same effect with less use of the propulsion system,” says Kjerstad, who adds that some elements of the algorithms may also be of interest for vessels that travel on the high seas.
- You might also like: Drilling down to understand sea ice
Signals ice movements
As a rule, the captain on board a ship in the Arctic has a support network during a mission. This support network, called the “ice management team,” usually consists of meteorologists and other people who are knowledgeable about ice or who have experience from similar operations.
The video shows a helicopter landing on the icebreaker Oden during the Oden Arctic Technology Research Cruise 2012. The video was shot by Sveinung Løset as he returned to the ship by helicopter after placing ice tracker sensors on icebergs. Video: Wenjun Lu, Sveinung Løset and SAMCoT
Kjerstad’s research work covers both the direct control of ships and decision-making support. He is working to develop systems that measure ice forces on the ship and that provide information about how the ice is moving in the ship’s immediate surroundings. Gauges placed at strategic points on the hull and radar collect these measurements.
A set of position reference sensors is delivered by helicopter to allow ice movements to be monitored. Since the sensors contain batteries, they cannot be dumped at sea and must be collected when the ship moves out of the field of operations.
The need to know how the ice is drifting is greatest when bad weather rolls in, and that is also when helicopter travel entails the greatest risk – or is impossible. The researchers hope that they will manage to create systems that give the captain the necessary information by using only sensors on board the ship. This would greatly reduce the need for helicopter use.
- You might also like: Working safely to protect a cold, remote place
Must rely on experience
“The ice can exert great forces on the boat, and the direction of the drifting ice can change a lot in a short time. A system that signals the movements of the ice will help reduce the risk of ice operations and make them more robust,” says Kjerstad.
To date there are no reliable systems that provide information on ice movement and the forces of the ice on the boat. The captain has to rely on his own or others’ experience with how to operate vessels in ice-covered waters.

Researchers setting out moored sonar buoys, which will collect data on the topography of the underside of the sea ice. PHoto: Øyvind Hagen, Statoil
The data that the scientists are collecting are also being applied to validate simulations and existing models that are used to design ships, systems and operations. Validated simulation models are particularly important in the Arctic, “where we have limited experience and opportunity for experiments,” says Kjerstad.
Moving toward autonomous technology
Today, the captain of a ship in the Arctic uses information from a multitude of channels that are continuously evaluated. Kjerstad and his colleagues are therefore working to build a unified operating picture that makes all the necessary information available through a single information system.
In the long term, this system may be linked to the direct control of the ship, and to autonomic technology – which can support the crew in their tasks on board and take over certain aspects of the control of the ship.
Kjerstad is affiliated with the Sustainable Arctic Marine and Coastal Technology (SAMCoT) centre for research-based innovation that NTNU hosts. SAMCoT works to ensure safe and environmentally friendly marine and coastal operations in the Arctic.
Kjerstad also collaborates with researchers at NTNU’s Centre for Autonomous Marine Operations and Systems (NTNU AMOS). The centre is working to develop intelligent marine structures and autonomous unmanned ships and other vessels.




