Using new technology to find shipwrecks on the ocean floor
An estimated three million shipwrecks lie in seabed graveyards around the world – with as many as 1000 of them around Svalbard. Each of them has their own unique story — one that’s made much more accessible with new technology.
Throughout the centuries ships have weathered wars, storms, icebergs, and pirates, to name a few. Many ships have been lost in the face of these forces and gone down with all hands. They lie on the bottom of the ocean with their stories and secrets. Many of them have been there for a long time, inaccessible in the depths to anyone but fish and other creatures.
“The world’s oceans are like a big museum,” says Øyvind Ødegård, a marine archaeologist at NTNU who recently defended his dissertation entitled “Towards Autonomous Operations and Systems in Marine Archaeology.”
“The technological advances that have taken place over the last few years are fantastic. A human diver can only work down to about 30 metres, and the vast majority of shipwrecks are much deeper than that. Underwater robotics, sensors, robots and control systems are now making it possible to obtain completely new insights into what’s on the seabed,” he says.
On the hunt for the Holy Grail
A particularly enticing ship graveyard lies between Svalbard and Greenland, where there are about 1000 wrecks. Seventeen of them are located in the Smeerenburg fjord. Ødeård is particularly interested in these ships.
“Somewhere down there on the bottom of the ocean are seventeen shipwrecks, all in about the same area. That’s the grail I’m hunting for,” he says.
How they all ended up there is a story unto itself.

Painting by Abraham Storck – Stichting Rijksmuseum het Zuiderzeemuseum. 022296. Public domain, Wikimedia.
Long before people relied on fossil fuels for heat and light, whales were a highly sought-after commodity because of their fat. The northern waters of the Arctic were rich with whales, particularly in the seas around Svalbard, Jan Mayen, Iceland and Greenland. This drew ships and people from many nations, in spite of the sometimes harsh conditions in these faraway waters.
Early in the 1600s, shipping nations like the Netherlands, France, Spain and England began whaling along the coast and in the fjords of Svalbard. The Netherlands led the charge and established the first whaling station north of Svalbard, called Smeerenburg. It was nicknamed “Fettbyen” or “Spekkbyen” – Fat town – as whale oil production took off.
The Sun King sank ships
These whaling ships plied the oceans for decades, supplying Europe with lamp oil, raw materials for soap, and boning for corsets and umbrellas, for which the baleen from the bowhead whales that were found in these waters was well suited. But the intensive hunt managed to almost exterminate whales in the fjords and along the coast in just a few decades.
And so the ships had to venture farther north, towards the ice’s edge and into more inhospitable waters, which inevitably led to shipwrecks. During one winter, thirteen Dutch ships became stuck in drift ice in Sorgfjorden. The crew had to abandon their ships and leave the full load on board. The crew survived by travelling to Smeerenburg on foot and in small vessels, but their ships disappeared into the frigid depths.
It wasn’t only difficult waters that caused shipwrecks, however. The highly prized whale oil and the opportunity to conquer new lands created major conflicts, not least between the Netherlands and France.
Louis XIV, the Sun King, was eager to damage the Netherlands’ economy and the country’s ability to wage war, and so sent his own warships north to Svalbard. Two French frigates and 40 Dutch whaling ships battled in 1693 in Sorgfjorden, which led to two ships sinking on the spot. Another seventeen Dutch ships were taken back to the Smeerenburg fjord and sunk there. These are the ships that Ødegård would love to learn more about.
World’s northernmost shipwreck
“We have reason to believe that there are many wrecks in the Arctic that are especially well preserved because of the cold water,” says Ødegård.

The autonomous underwater vehicle Hugin on its way to the deep. Photo: Geir Johnsen, NTNU
Two years ago, he was on an expedition in the region with biologists, technologists and polar scientists. The goal was to study life in the sea during the polar night – and they investigated a shipwreck in Isfjorden that is the world’s northernmost mapped shipwreck to date.
Much to their surprise, the researchers also found a clam that usually does not live that far north and in such cold water. This discovery doesn’t bode well for shipwrecks and adds urgency to the need to locate and map them. Ultimately, the goal is to organize a more extensive research expedition to the area of the seventeen ships.
Enormous underwater technology advances
Accomplishing this will require the technological innovations that Ødegård and his colleagues have been testing.
Researchers can now use underwater robotics and joysticks to control underwater operations with great precision. The control systems are advanced and smart, and artificial intelligence (AI) and powerful computers enable robots to evaluate many situations independent of human help.
“We’ve seen huge developments in underwater robotics and relevant sensor technology over the last few years. In my PhD thesis, I looked at how selected platforms and sensors can be used to develop new methods for marine archaeology research with a high degree of autonomy, and I suggest a model for how such decisions can be made without needing a human being in the loop,” Ødegård said.
Smart sensor technology
Three sensor technologies are essential for mapping shipwrecks at great depths and with great precision.

3D model of a wreck at Munkholmen in Trondheim harbour based on photogrammetry. Draped with photo mosaic (top) and colour-coded point cloud (bottom).
“Synthetic aperture sonar (SAS) technology, which is a high-resolution acoustic sensor developed by the Norwegian Defence Research Establishment and Kongsberg Maritime, has collected data that represents a quantum leap in quality and accuracy, compared to traditional methods,” says Ødegård.
This acoustic sensor produces high-resolution images. Detailed bottom maps can thus provide important information without the need for inspection dives with a video camera to confirm or eliminate possible wreck finds.
Another tool that the researchers have used is an underwater hyperspectral imager (UHI). This is an optical sensor that takes photographs using the entire visible light spectrum. Common cameras use only three wavelengths (RGB), whereas an UHI can use up to 800.
Finally, a stereo camera on a ROV (remote controlled underwater robot) is used to create high-resolution 3D models of selected wrecks using photogrammetry. The camera provides resolutions down to the millimetre level.
The stereo camera is “excellent for documenting and monitoring wrecks, where even small details can be very important,” Ødegård says.
These three sensors, plus others, should be able to be housed on a single underwater vessel, which collects and analyses data on its own. Based on the analyses, the ROV determines whether it will take the time to investigate and possibly document what is most likely a wreck, or whether it will go on to map new areas.
Article continues below image.
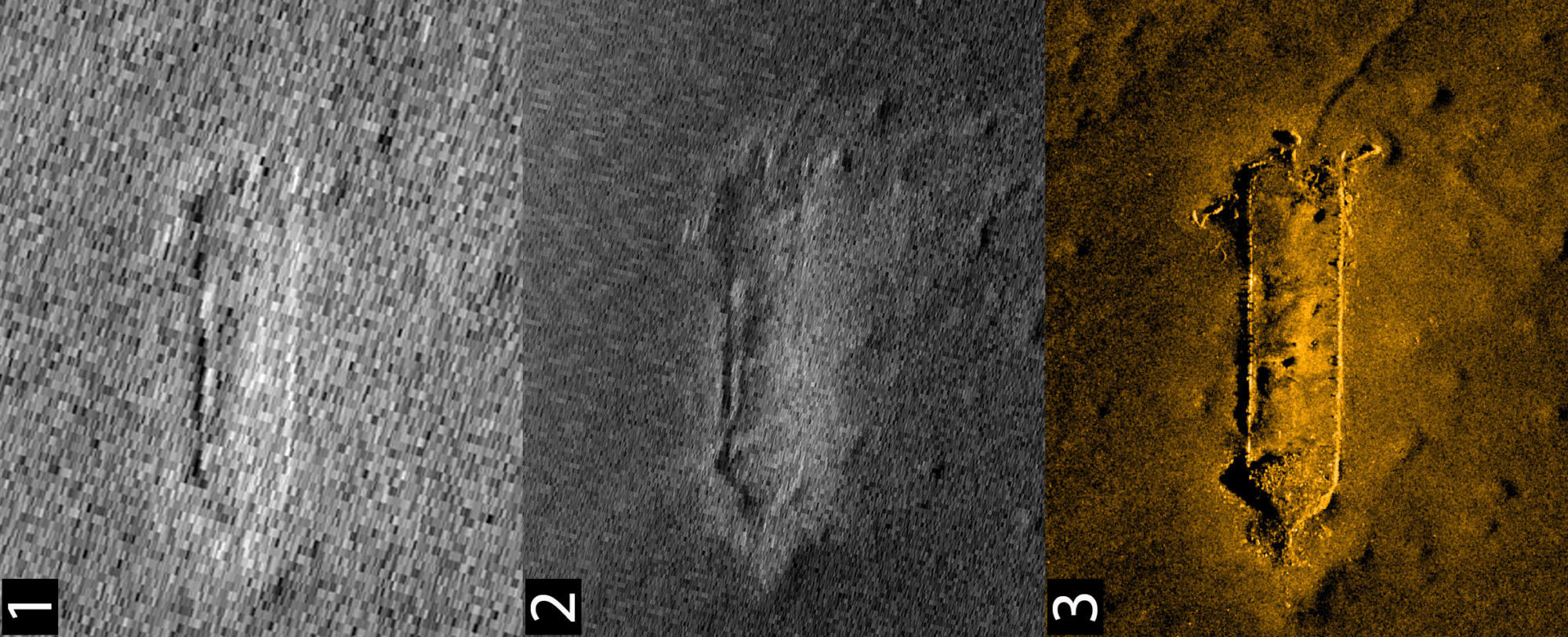
Pictures 1 and 2 show wrecks depicted with standard side-searching sonar. Picture 3 shows the same wreck depicted with Synthetic Aperture Sonar (SAS). Picture: Norwegian Defence Research Establishment
Archaeologists, engineers and biologists in the same boat
Øyvind Ødegård has 20 years of experience as a marine archaeologist and works at the NTNU University Museum. While he worked on his doctorate, he maintained a 75 per cent affiliation with AMOS, NTNU’s Centre for Autonomous Marine Operations and Systems.
“In order to build more depth into the research I was doing at the museum, Asgeir Sørensen suggested that I take a doctorate to build up a student group in the field of marine archaeology and technology,” says Ødegård.
He worked in interdisciplinary teams with biologists and engineers, in addition to archaeologists.
“This research has opened the eyes of biologists and engineers to the world of underwater archaeology. We can see that we share a lot of common interests, and it’s fun and useful to work in an interdisciplinary way – even though it gets a bit crazy occasionally,” he says.
Ødegård will continue to split his time between AMOS and the NTNU University Museum in the future and will continue to study technology can help us collect new information from the ocean depths.

A variety of items typical found at wreck sites. Measurements taken in the lab formed the basis for a spectral library that can be used to classify measurements on the seafloor.
Self-propelled vessels are the goal
Ødegård notes that AMOS and the AUR lab have developed a lot of the equipment that the researchers use.
“We test new equipment in the field, so it’s a win-win situation for the people who are developing the technology as well as for those of us who use the technology for research. We’ll also keep working with the Defence Research Establishment, which is at the forefront of research on extensive and powerful AUVs,” he says.
“The long-term goal is to have extended and completely autonomous expeditions with unmanned AUVs, where wrecks can be detected, mapped and inspected with a variety of sensors and then return to the surface with high quality datasets. We aren’t quite there yet, but we’ve been surprised by how close and how far we’ve come,” Ødegård says.
Links to scientific publications by Øyvind Ødegård and other researchers, including from AMOS:
Underwater hyperspectral imaging: a new tool for marine archaeology
Archaeological use of Synthetic Aperture Sonar on deepwater wreck sites in Skagerrak
A new method for underwater archaeological surveying using sensors and unmanned platforms